Jumeau numérique
Telemovtop : quand la robotique relève le défi du désamiantage
Date:
Chercheuse au Centre Inria Nancy - Grand Est, Serena Ivaldi est passionnée de robotique, qu’elle voit comme un vaste champ d’exploration scientifique tourné vers des applications concrètes. Avec ses collègues de Larsen, elle se concentre sur la collaboration entre robots et humains. Un sujet qui se nourrit aussi bien de concepts théoriques que d’applications concrètes.
« En tant que chercheurs, nous travaillons avant tout sur des prototypes de robots, en développant des outils permettant leur interaction avec les humains, explique Serena Ivaldi. Il s’agit par exemple d’améliorer le contrôle et la planification de leurs mouvements, pour les adapter à des environnements variés ou des tâches de plus en plus complexes, et de perfectionner la capacité à interagir avec les humains. Nous nous appuyons pour cela sur différentes disciplines comme la théorie du contrôle, l’automatique, l’optimisation, l’apprentissage machine, etc. »
Toutefois, ces travaux ne se limitent pas à ces seuls aspects scientifiques : « Notre objectif est aussi de "faire sortir nos robots du laboratoire", c’est-à-dire de confronter nos développements à des usages réels, pour répondre à des demandes du secteur industriel ou médical par exemple », souligne la chercheuse.
Avec Telemovtop, qui vise à mettre au point un système robotisé intelligent pour réaliser le désamiantage des toitures de bâtiments, Serena Ivaldi travaille dans cette direction. Un sujet aux nombreux défis scientifiques touchant la santé au travail et l’écologie. Conçue de concert par l’entreprise Iso-Top étanchéité et l’équipe Larsen, cette initiative a obtenu le soutien de la région Grand Est dans le cadre de l'appel à projet "AMI Économie numérique" à l'automne 2019.
Quel est le champ d’intervention d’Iso-Top ? « Entreprise de la région de Reims, nous sommes une société familiale du secteur du bâtiment, précise Stanislas De Benoist, son directeur. Nous travaillons pour de grands donneurs d’ordre du secteur industriel, des services publics ou des collectivités, en particulier sur des chantiers de désamiantage de bâtiments, toitures, façades, etc. » Ces opérations sont à la fois très complexes, puisqu’il faut respecter un protocole strict lié à la gestion de l’amiante, et pénibles pour les experts qui les conduisent : vêtus de tenues de protection intégralement étanches, ils travaillent dans des environnements dangereux (hauteur, pente, etc).
« Depuis sa création, notre entreprise a développé son activité dans un état d’esprit ouvert sur l’innovation et la technique, pour répondre à des problèmes environnementaux, indique Stanislas de Benoist, directeur technique chez Iso-Top étanchéité. Nous cherchons en permanence à améliorer nos façons d’opérer, en particulier en garantissant le maximum de sécurité. Nous avons réfléchi aux apports possibles de la robotique pour les tâches les plus critiques du désamiantage et souhaité devenir un véritable acteur dans ce domaine. »

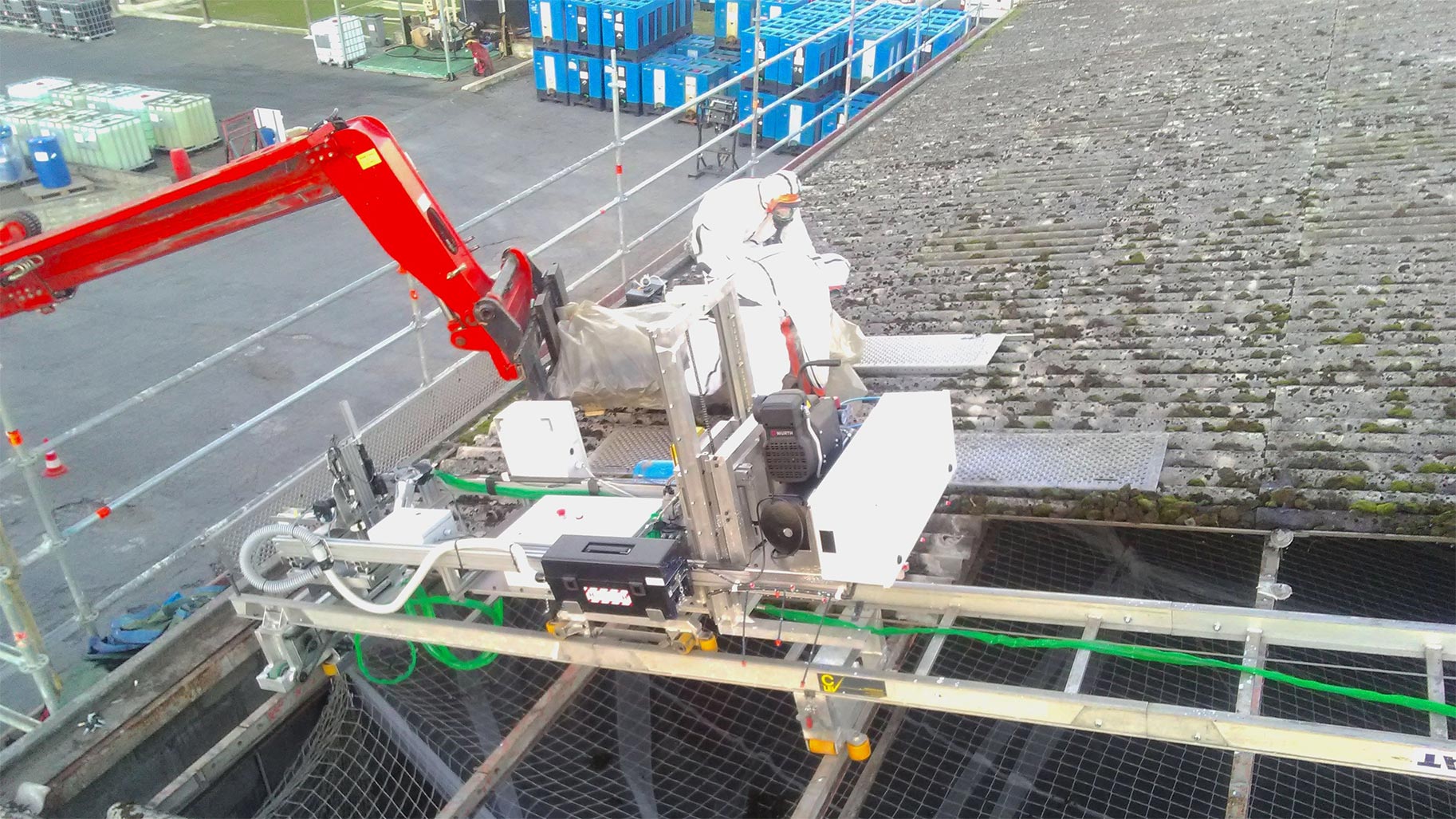
En 2018, Iso-Top remporte un premier appel à projet du ministère de l’Écologie afin de concevoir un robot dans le cadre d’une collaboration avec les Arts et Métiers (ENSAM Metz). Testé en laboratoire, puis en conditions réelles, le système robotisé remplit parfaitement son rôle : se déplaçant sur des toitures de manière téléopérée, il procède à l’enlèvement des plaques en fibrociment après en avoir neutralisé les vis de fixation. Remplaçant les humains dans cette tâche, il réduit ainsi le risque encouru par les opérateurs, plus généralement par d’autres usagers et riverains des bâtiments traités, lors du retrait de l'amiante.
L’entreprise ne s’arrête pas en si bon chemin. « Après ce premier test, très concluant, nous avons voulu aller plus loin en perfectionnant le système de pilotage, pour pouvoir opérer non plus à proximité du robot, mais à distance, explique Stanislas de Benoist. Cependant, améliorer notre robot en intégrant un système de pilotage automatique plus polyvalent soulevait de nombreux défis techniques que nous ne pouvions relever seuls, car notre entreprise ne dispose pas de moyens de recherche. »
Avec le budget obtenu auprès de la région Grand Est pour financer Telemovtop, couvrant les dix-huit mois de travail d’un ingénieur de recherche, le partenariat avec les équipes d’Inria s’est donc avéré déterminant pour Iso-Top. « Nous avons tout d’abord travaillé à l’optimisation et au contrôle des mouvements du robot en prenant en compte les spécificités des tâches de désamiantage, précise Serena Ivaldi. Saisir et manipuler une plaque, tout en étant capable de se retourner et de se déplacer sur une toiture en pente, et en évitant toute collision ou glissement… sans jamais laisser tomber la lourde plaque d’amiante : les performances attendues étaient élevées ! »
Étape suivante, les équipes d’Inria ont travaillé sur l’ergonomie du système destiné à être opéré à distance, à partir d’informations sur l’environnement. Réglage des consignes, des actionneurs, des contrôleurs sur la vitesse ou la position du robot : rien n’a été laissé au hasard par les scientifiques qui ont même développé une innovation, un jumeau numérique.
Serena Ivaldi expose ses atouts : « Le jumeau numérique est un modèle simulé du système robotisé, qui intègre à la fois un modèle de comportement mécanique et des données issues de capteurs. Il permet de simuler et visualiser l’état du robot en temps réel. D’un côté, il permet de mieux planifier les mouvements du robot, en les adaptant à son environnement ou à la diversité des tâches à accomplir en termes de désamiantage. De l’autre, il rend possible le pilotage du robot avec une vision globale du système in situ : on peut visualiser le robot sur la toiture, par exemple, et disposer d’autres informations complémentaires de celles transmises par les caméras embarquées sur le robot qui donnent une vue partielle des opérations en cours. »
Avec Telemovtop, la chercheuse a donc développé un jumeau numérique du robot d’Isotop et l’a testé dans des conditions proches du réel pour aider les opérateurs dans le pilotage. « Le projet est extrêmement motivant, tant d’un point de vue théorique que pratique, témoigne-t-elle. Cette collaboration avec Iso-Top nous a permis de développer des sujets scientifiques pour assurer les performances du système : stabiliser la saisie d’un objet lourd, sécuriser les mouvements en rotation du robot lors du transport des objets, éviter les collisions, etc. »
Désormais, le projet entre dans une nouvelle phase : une seconde version du robot intégrant les développements apportés par Inria et l’ENSAM sera construite d’ici à début 2023. Iso-Top a déjà identifié des cas d’usages et recherche un financement pour finaliser cette démarche. L’entreprise a d’ores et déjà réussi un pari : « On entend beaucoup parler de robotique dans le secteur du bâtiment, mais on observe encore peu d’applications concrètes. Avec ce projet, nous avons fait la démonstration que des innovations imaginées dans des laboratoires comme ceux d’Inria peuvent rapidement être transformées en solutions opérationnelles », se félicite Stanislas de Benoist. Du laboratoire au chantier, il n’y a donc qu’un pas.