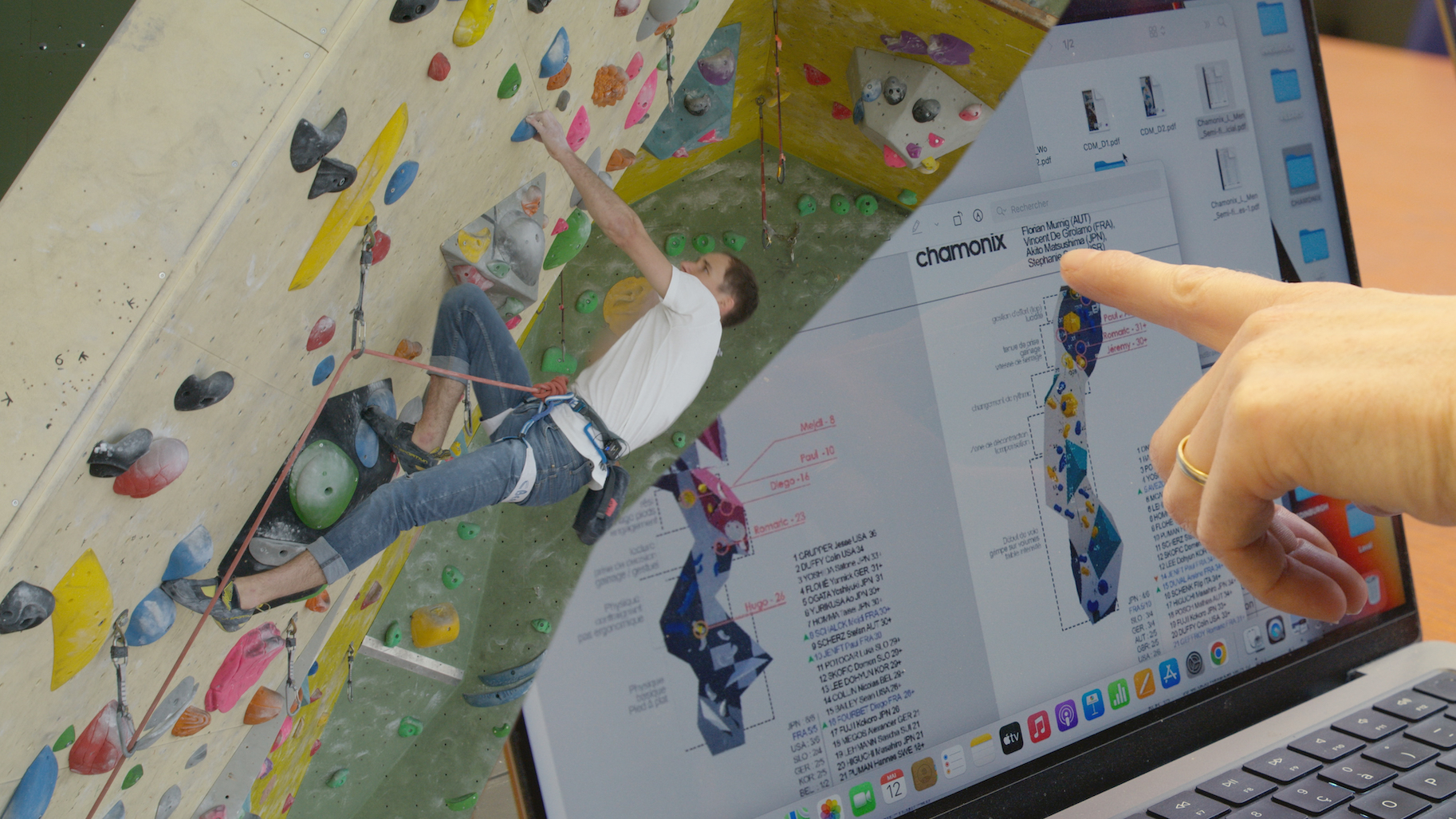
Sport JO 2024 : Quel rôle pour les scientifiques français ? Transports connectés SUM : des solutions durables et innovantes pour la mobilité en Europe Environnement et planète Une plate-forme innovante pour mieux observer le milieu naturel
© Inria / Photo É. Garault 8 novembre 2023 – 7 novembre 2024 Logiciel Un MOOC scikit-learn développé par ses créateurs !
© BreizhCTF 17–18 mai 2024 Cybersécurité Inria participe au BreizhCTF 2024 à Rennes Lieu : Couvent des Jacobins - Rennes
© Paris-Saclay SPRING 16–17 mai 2024 Startup Studio Retrouvez Inria à la 7e édition de Paris-Saclay SPRING les 16 et 17 mai 2024
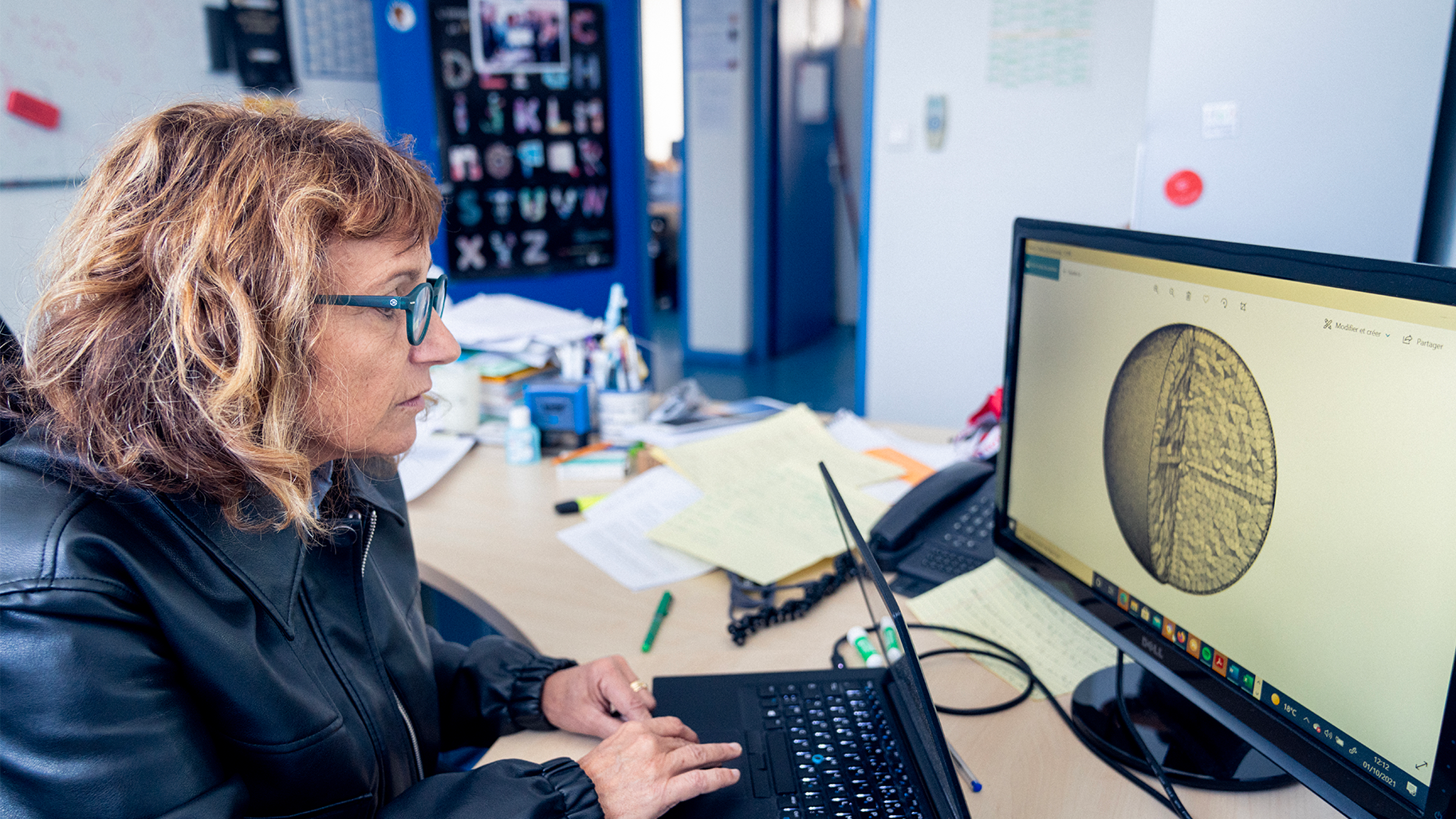
Culture & Société Allier mathématiques et machine learning pour défricher les réseaux sociaux 25/04/2024
Forum des Arts et de la Culture 16 février – 25 avril 2024 Exposition Échelles Célestes : explorez l’Univers au travers d'une expérience poétique, artistique et scientifique Lieu : Forum des Arts et de la Culture
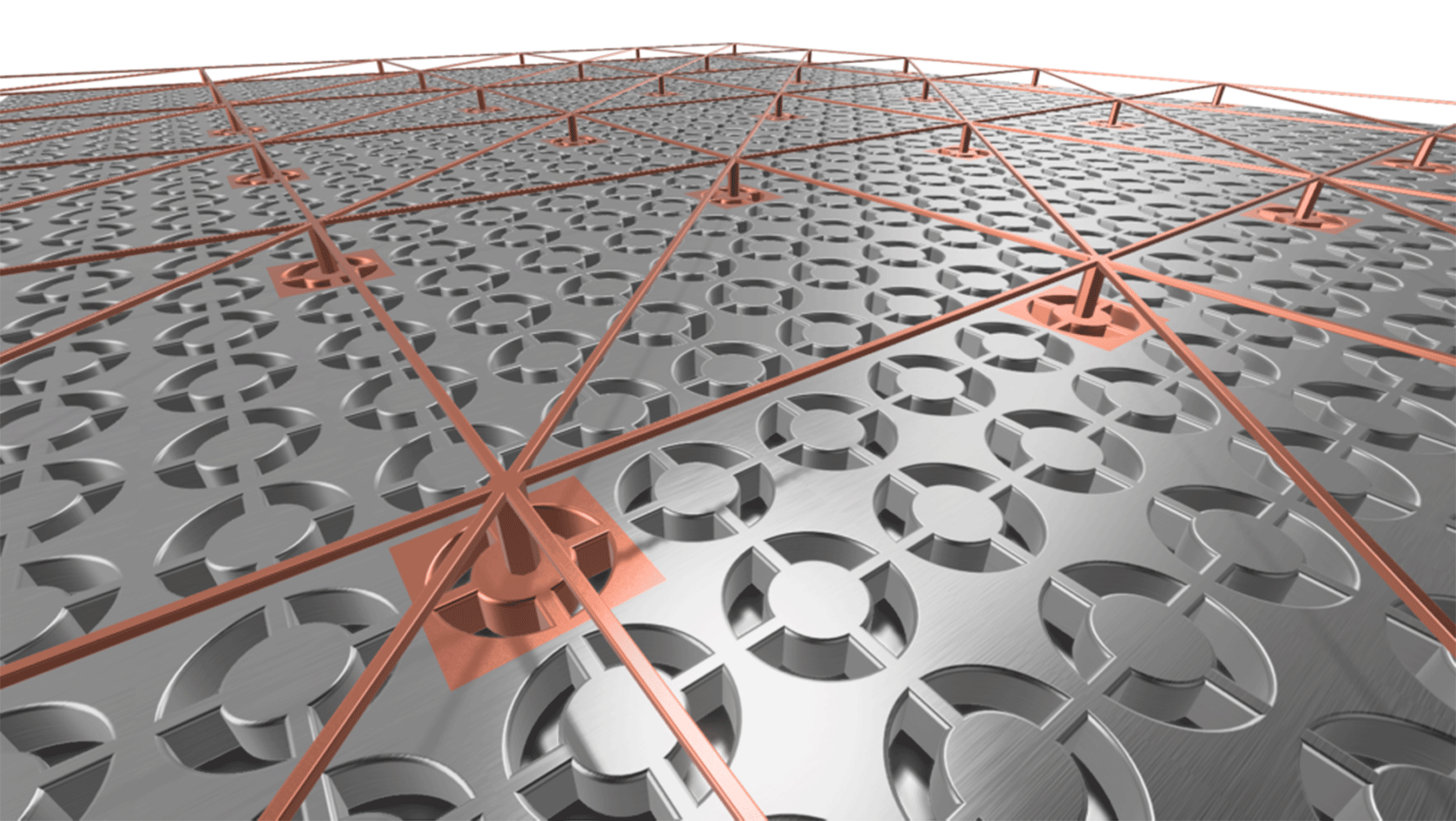
© Inria / Christophe Droz - équipe I4S Transport Un nouveau concept d'isolants acoustiques pour le transport 18/04/2024
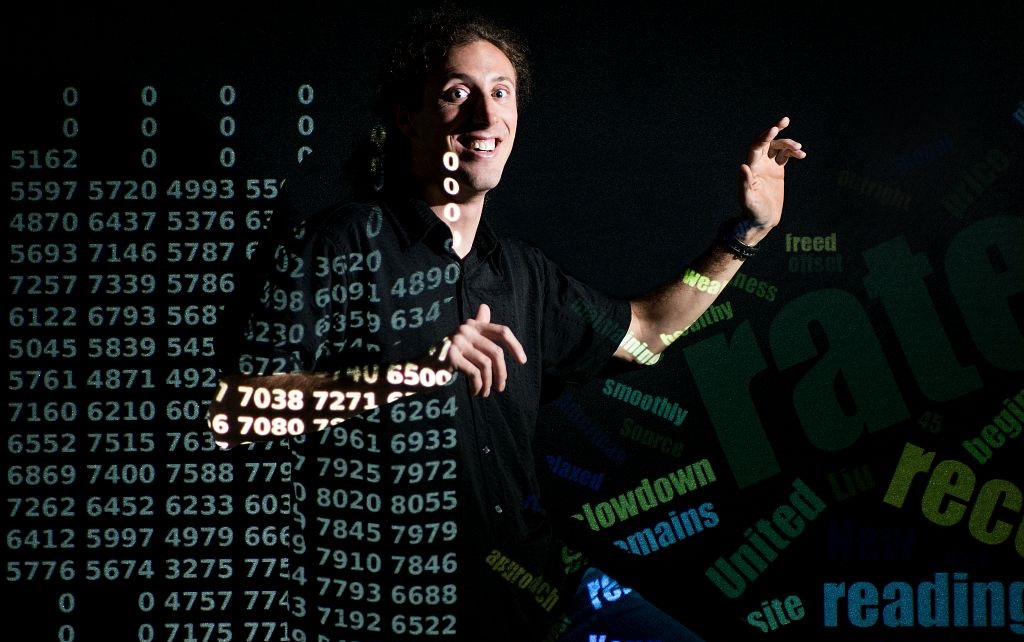
© Inria / Photo B. Fourrier Sport Numérique et performance sportive : comment la recherche aide à repousser les limites des athlètes 17/04/2024
© Inria / équipe HYBRID et VirtUs 10–12 avril 2024 Communication / Événement Agir pour le futur à la 26e édition du Laval Virtual du 10 au 12 avril 2024 Lieu : Espace Mayenne
© Inria / Photo B. Fourrier Modélisation et Simulation Écouter le Soleil pour explorer sa structure 09/04/2024
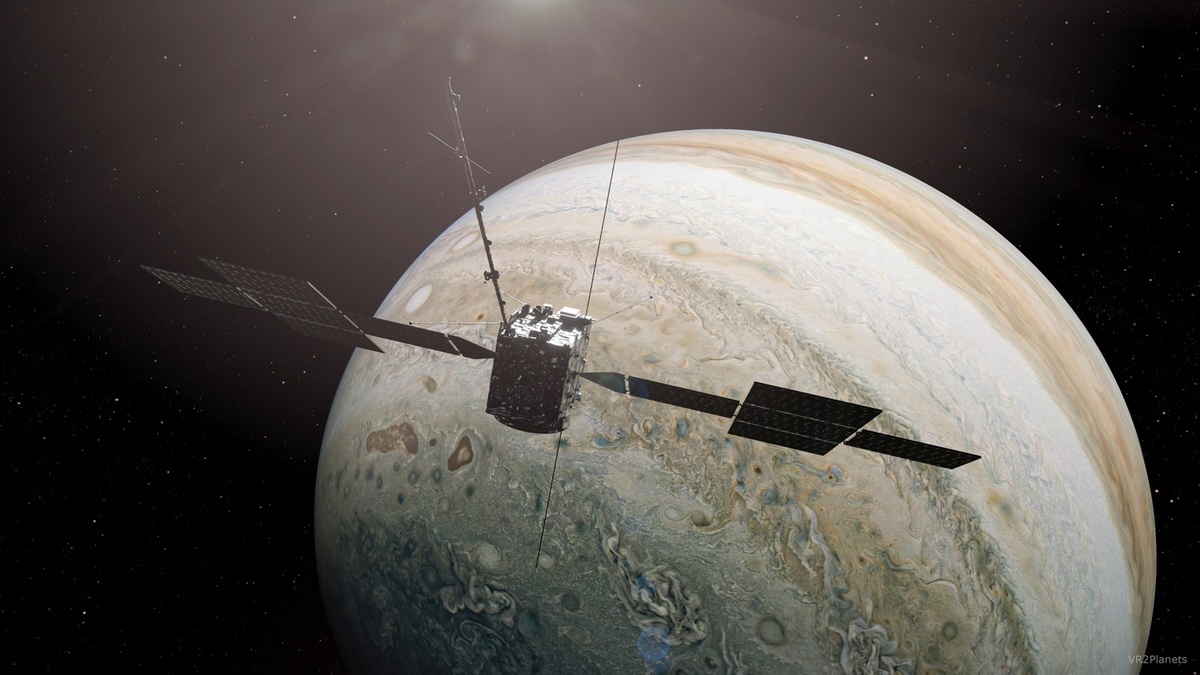
@NASA/JPL-Caltech/SwRI/MSSS/kevin M.Gill/VR2Planets/2023 Industries du futur Spatial : Inria et le CNES s’allient autour de la construction des satellites du futur 08/04/2024
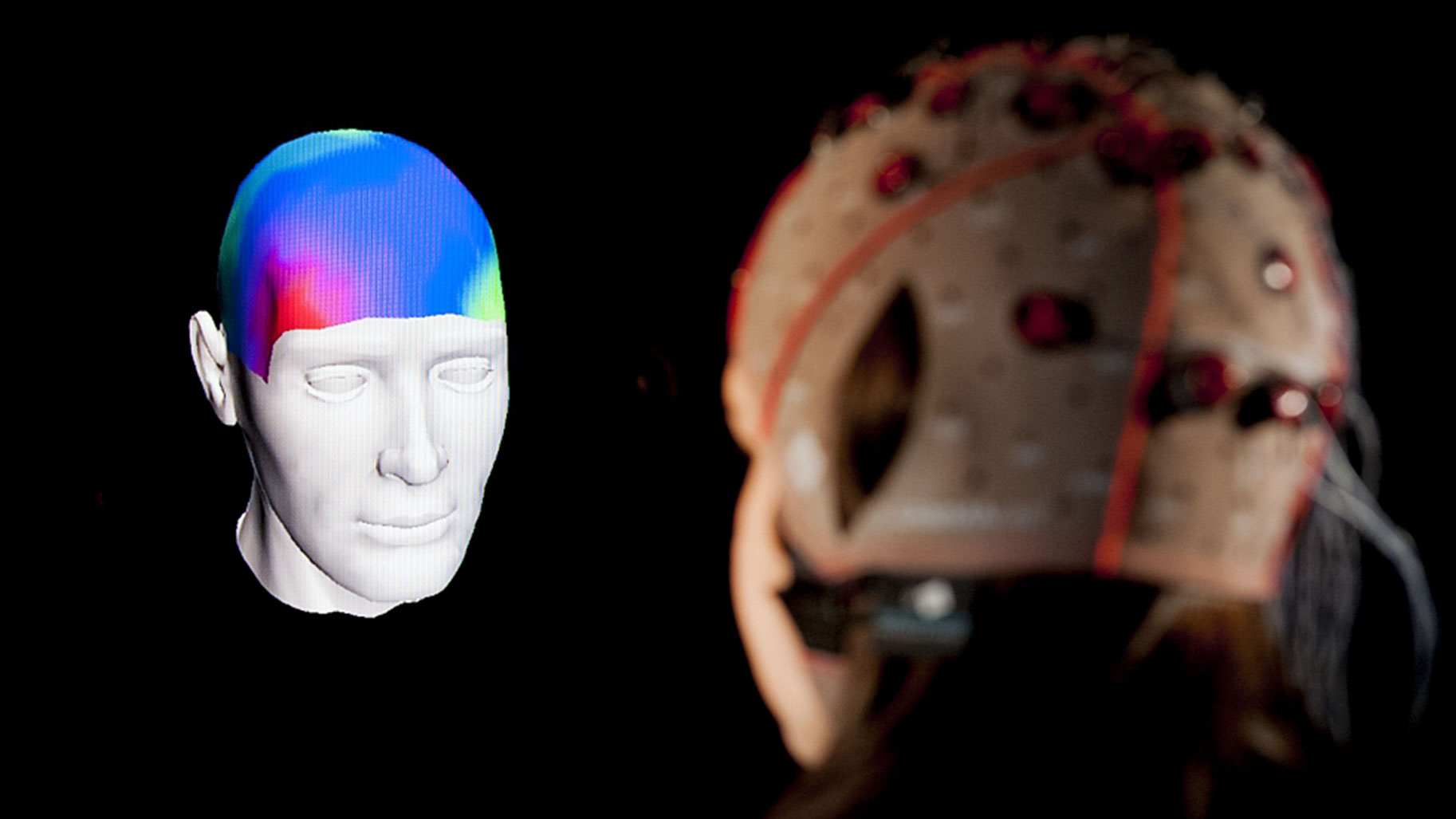
© Inria / Photo H. Raguet Santé / Médecine personnalisée Santé numérique : de la prévention au diagnostic jusqu’au traitement 07/04/2024